










A device that detects (senses) a change in a physical stimulus (such as motion, heat, light, sound, pressure, magnetism, radiation level, or a chemical property) and transmits a signal (mostly electrical or optical) for a measurement (display) or a control (action).

A block diagram representation of the WISA accelerometer is shown in the the above figure. An acceleration input normal to the proof mass produces a voltage output proportional to the input acceleration.
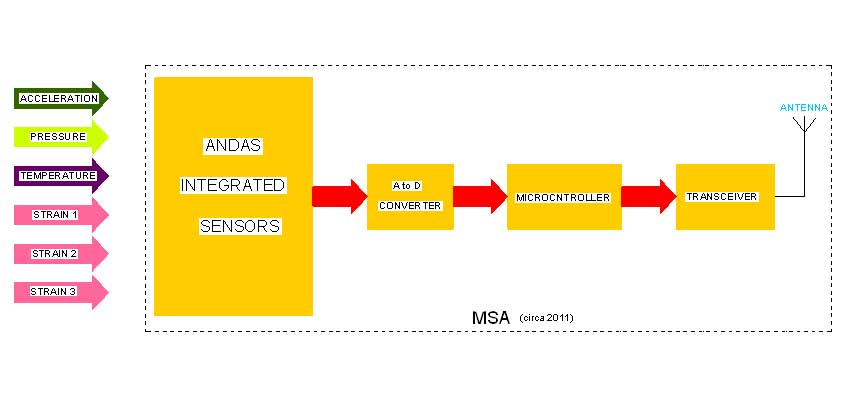
The above figure shows the block diagram of a micro-sensor assembly (MSA), which is a part of ANDAS remote node. This device is cemented to the skin of an air vehicle, where it senses normal acceleration, pressure, temperature, strains along three direction 45 degrees apart on the surface of the skin.
| SENSOR TYPE | FAB PROCESS TYPE | DESCRIPTION |
| Accelerometer | Bulk Micro-machined in (100) Si | Closed Loop Capacitive Pickoff and Electrostatic Forcing (Navigational System Applications) |
| Hydrophone | Bulk Micro-machined in (100) Si | Piezoelectric Sensor of Doublet Construction (For Towed Array & High Directivity Applications) |
| G-Hardened Multi-sensor Coriolis Accel | Bulk Micro-machined in (110) Si | Closed Loop Capacitive Pickoff and Electrostatic Forcing (Survives 25,000 G shocks) |
| High Accuracy Multi-Sensor Coriolis Accel | Bulk Micro-machined in (110) Si | Closed Loop Capacitive Pickoff and Electrostatic Forcing (Survives 2,500 G shocks) |
| Accelerometer | Surface Micro-machined 3 lyr PolySi | Closed Loop Capacitive Pickoff and Electrostatic Forcing |
| Digital Accelerometer | Surface Micro-machined 3 lyr PolySi | Open Loop Step Switches |
| Dual Gimbal Gyro Single-Axis (Gyroscopic) |
Surface Micro-machined 3 lyr PolySi | Closed Loop Capacitive Pickoff and Electrostatic Torquing |
| Dynamically Tuned Dual Gimbal Gyro (Gyroscopic) | Bulk Micro-machined in (100) Si Laser Trimmed Tuning | Closed Loop Capacitive Pickoff and Electrostatic Torquing |
| Dynamically Tuned Dual Gimbal Gyro (Gyroscopic) | Bulk Micro-machined in (110) Si Laser Trimmed Tuning | Closed Loop Capacitive Pickoff and Electrostatic Torquing |
| High-G Accelerometer | Bulk Micro-machined in (100) Si | Open Loop Piezoresistive Bridge Measurements |
| Accelerometer | Micromolded Sens Structure in Nickel | Closed Loop Tunnel Diode Pickoff and Electrostatic Forcing Comb Structure |
| Dual Gimbel Single Axis Gyro | Micromolded Sens Structure in Nickel | Closed Loop Tunnel Diode Pickoff and Electrostatic Forcing Structure |
| Gel Filled Waveguide Gyro | Micromolded Sens Structure in Nickel | Single Chip Opto-interferometric Device (Micro FOG concept) |
| Single CHip Hybrid FOG | Flipped LiNbO3 on (100) Si | Passive Fiber Optic Gyro |
| Six DOF Inertial Measurement Device | Bulk Micro-machined in (110) Si | Closed Loop Capacitive Pickoff and Electrostatic Forcing / Torquing |
| Six DOF Inertial Measurement Device | Surface Micro-machined 3 lyr PolySi | Closed Loop Capacitive Pickoff and Electrostatic Forcing / Torquing |
| Six DOF Integrated Inertial Measurement Device (IIMD) | Micromolded Sens Structure in Nickel | Closed Loop Tunnel Diode Pickoff and Electrostatic Forcing / Torquing |
| Six DOF Integrated Inertial Measurement Device (IIMD) | Surface Micro-machined 3 lyr PolySi | Closed Loop Capacitive Pickoff and Electrostatic Forcing / Torquing |
| Dual Gimbal Beam Steering Mirror | Surface Micro-machined 3 lyr PolySi | Open Loop ElectroStatic Torquing Using Push-pull Mechanism |
| Digitally Programmable Beam Steering Mirror | Surface Micro-machined 3 lyr PolySi | Open Loop ElectroStatic Torquing Switches providing step changes in angular deflection |
