










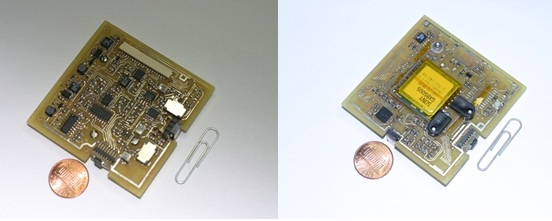
Many applications employ a number of sensors packaged together to sense several measurands. For example the Self Initializing INS/GPS combo board, shown below, has 3 gyros, 3 accelerometers, a temperature sensor and a GPS, all clustered together with their electronics on a single board. Most navi systems require initialization before they can start their strapdown INS computations. Adding a GPS provides the position information, but not the heading of the vehicle. So this combo board also adds a triad of magnetic field sensors, to provide local heading with respect to the Earth's magnetic field during initialization. Thus, the unit not only knows its initial position via GPS, it also knows the orientation of its strapdown sensor axes relative to magnetic north and Earth's local gravity vector. This reduces the entire INS/GPS coupled sensing system to one small board.
The match box IMU is another example of cluster electronics shown in the photographs below.
In this case, three sets of gyro and accelerometer boards are placed orthogonally in a package. All the electronics for combining
the triad (I/O and power conversion) is placed on a seventh board of the same size. The IMU interface is via a miniature (NANONIX)
connector placed at the end of a wiring harness.
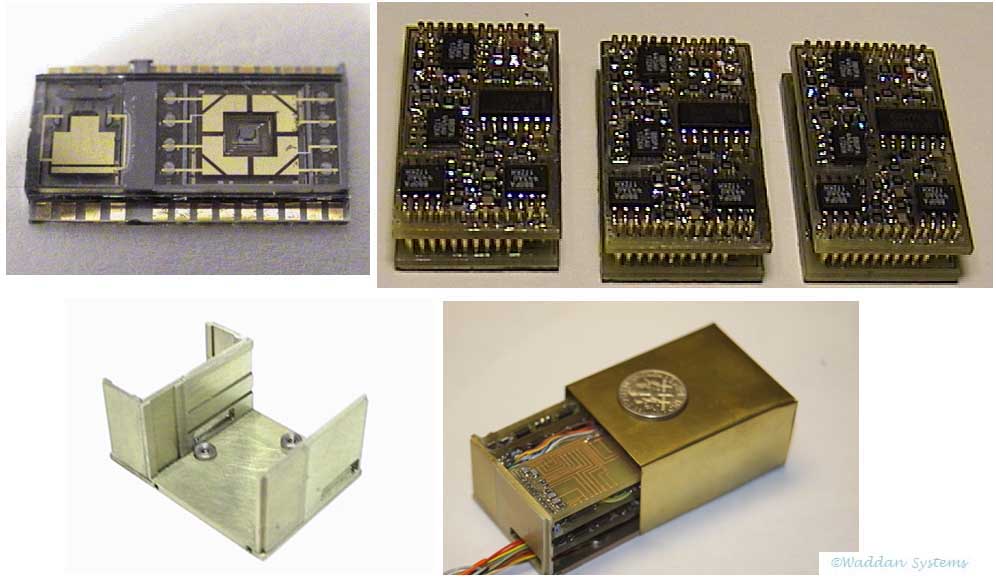
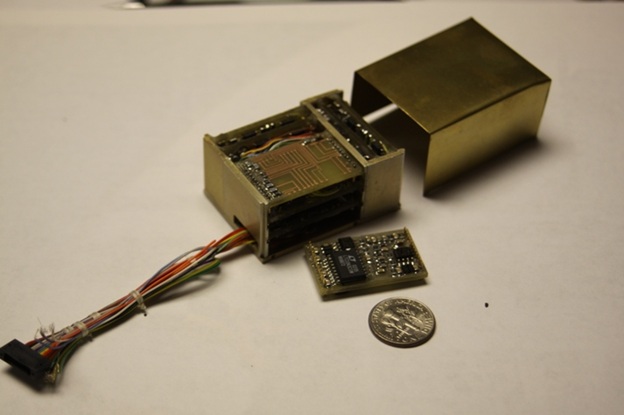
The Match Box IMU and a commercial GPS are embedded in the MAGI system. The entire system is modular and uses the compact PCI platform. It has six different modules which can be upgraded individually without affecting the overall size and shape. It has a processor module, a GPS module, an INS module, an I/O interface module, a solid state drive module, and a power supply; all plugged into a common back plane. The system can be operated as a desktop PC based system, or can hang on a network as an Ethernet node. The photos below show Waddan's Match Box IMU mounted behind the back plane. The photo on the bottom shows the complete MAGI system.

