











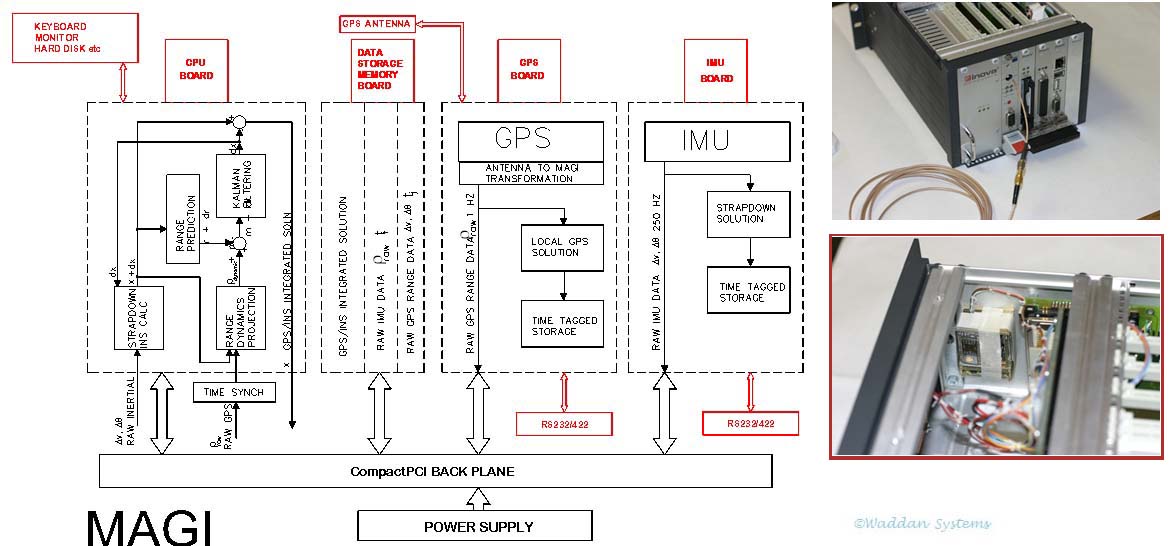
 This system combines a commercial GPS unit with an inertial measurement
unit. The entire system is modular and uses the compactPCI platform. It
has six different modules which can be upgraded or replaced
individually without affecting the overall size and shape of the
system. It has a processor module, a GPS module, an INS module, an I/O
interface module, a solid state drive module, and a power supply; all
plugged into a common back plane. Each active module has its own
software drivers. The system is designed with a small footprint Windows NT
OS at the time of delivery, however, it can support other OS. The system can be operated as a
desktop PC based system, or can just hang on network as an Ethernet
node. The photo inserts on the right hand side show MAGI's front panel
and IMU housing.
This system combines a commercial GPS unit with an inertial measurement
unit. The entire system is modular and uses the compactPCI platform. It
has six different modules which can be upgraded or replaced
individually without affecting the overall size and shape of the
system. It has a processor module, a GPS module, an INS module, an I/O
interface module, a solid state drive module, and a power supply; all
plugged into a common back plane. Each active module has its own
software drivers. The system is designed with a small footprint Windows NT
OS at the time of delivery, however, it can support other OS. The system can be operated as a
desktop PC based system, or can just hang on network as an Ethernet
node. The photo inserts on the right hand side show MAGI's front panel
and IMU housing.
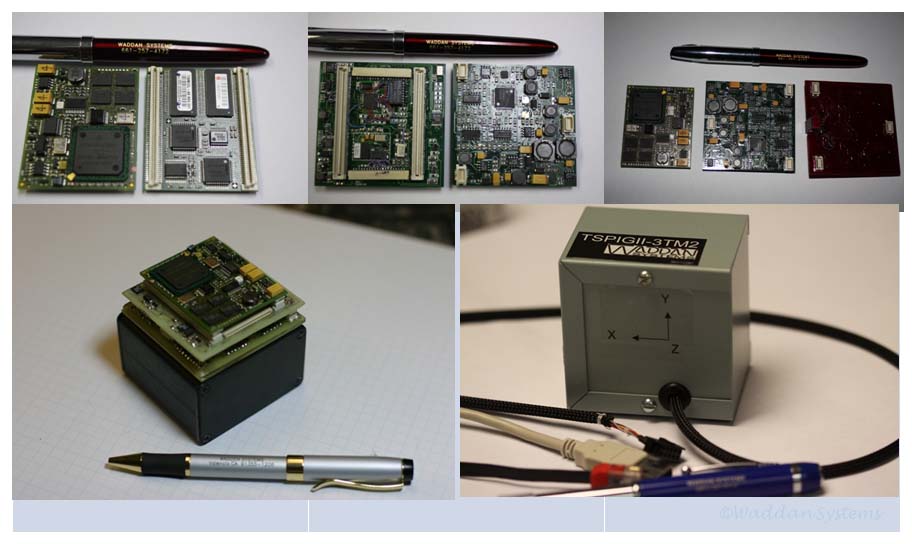 TSPIGII is a miniature version of the MAGI. It consists of a flat-pack
IMU, a processor board with a dual core power PC, 2 GB RAM, and 16 GB
Flash, a third board with a commercial GPS chipset, USB, Ethernet,
RS232 and other power conditioning hardware. The packaged TSPIGII
system measures 50mmX50mmX25mm. A customized small footprint embedded
Linux is loaded for system processing and interfacing with the outside
world. Currently it is programmed to provide three nav solutions-GPS
alone, INS alone and a tightly coupled solution.
TSPIGII is a miniature version of the MAGI. It consists of a flat-pack
IMU, a processor board with a dual core power PC, 2 GB RAM, and 16 GB
Flash, a third board with a commercial GPS chipset, USB, Ethernet,
RS232 and other power conditioning hardware. The packaged TSPIGII
system measures 50mmX50mmX25mm. A customized small footprint embedded
Linux is loaded for system processing and interfacing with the outside
world. Currently it is programmed to provide three nav solutions-GPS
alone, INS alone and a tightly coupled solution.
 The MAGI and TSPIGII systems as mentioned above requires initialization
before they can start their strapdown INS computations. A single GPS
can provide only its position, not the heading. As a further evolution
of TSPIGII, a triad of magnetic field sensors was incorporated, and the
GPS unit was also merged in the same board as shown in the above
photographs. Thus, the unit not only knows its initial position via
GPS, it also knows the orientation of its strapdown sensor axes
relative to magnetic north and Earth's local gravity vector. This
reduces the number boards to two in an INS/GPS coupled system-one for
all sensors and the other for a microprocessor.
The MAGI and TSPIGII systems as mentioned above requires initialization
before they can start their strapdown INS computations. A single GPS
can provide only its position, not the heading. As a further evolution
of TSPIGII, a triad of magnetic field sensors was incorporated, and the
GPS unit was also merged in the same board as shown in the above
photographs. Thus, the unit not only knows its initial position via
GPS, it also knows the orientation of its strapdown sensor axes
relative to magnetic north and Earth's local gravity vector. This
reduces the number boards to two in an INS/GPS coupled system-one for
all sensors and the other for a microprocessor.

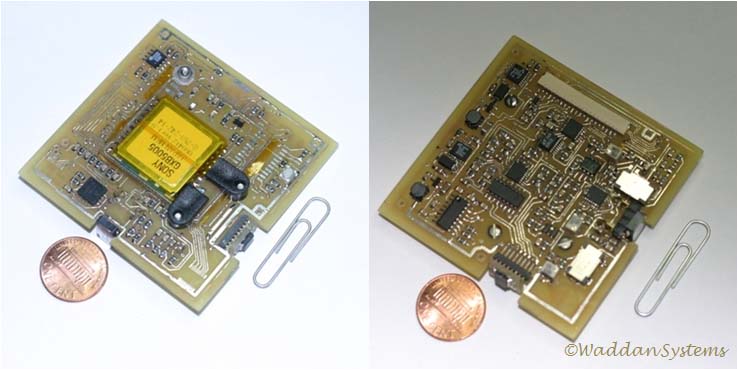
The board shown above replaces the Sony GPS chip with one from Lotus (It actually is based on a derivative of old Motorola GPS chips). Moreover, this board includes a microprocessor and its associated memory as well. Thus, it is a single board self initializing INS/GPS system.
