










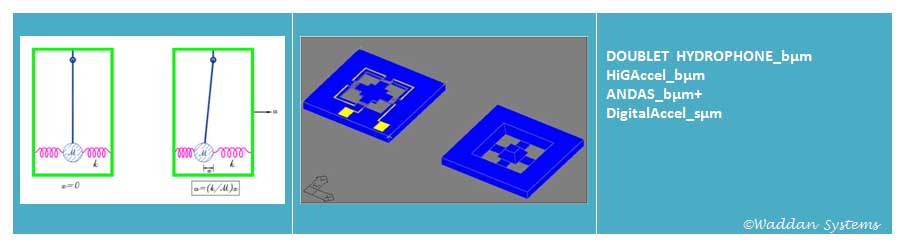
 An open loop sensor directly responds to an input stimulus. Its
physical structure is directly affected by the input (e.g. a pressure
change affecting the level of deformation in a diaphragm).
A greater input produces a greater physical change, and thus, greater
output signal. A design compromise is always made between the
measurement sensitivity and measurement range. For higher sensitivity,
one has to
sacrifice the range; and for wider range one has to sacrifice the
sensitivity. In general, open loop sensors operate linearly over a very
narrow range; and have a nonlinear response over the full
operational range. These devices require look-up table calibration, or
some other means of compensation.
An open loop sensor directly responds to an input stimulus. Its
physical structure is directly affected by the input (e.g. a pressure
change affecting the level of deformation in a diaphragm).
A greater input produces a greater physical change, and thus, greater
output signal. A design compromise is always made between the
measurement sensitivity and measurement range. For higher sensitivity,
one has to
sacrifice the range; and for wider range one has to sacrifice the
sensitivity. In general, open loop sensors operate linearly over a very
narrow range; and have a nonlinear response over the full
operational range. These devices require look-up table calibration, or
some other means of compensation.
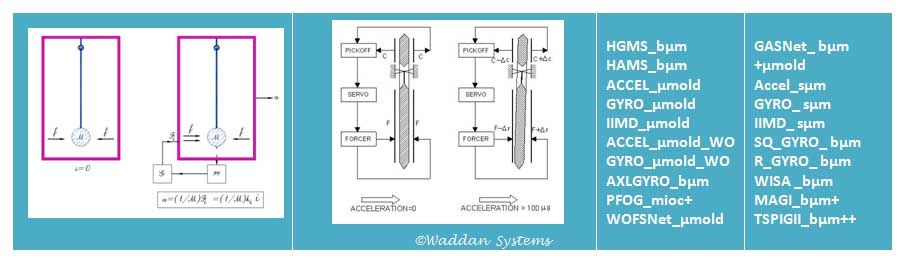 The closed loop sensor response does not depend upon the physical
change of the sensor directly, but upon an indirect measurement. As the
navigational grade accelerometer has to have resolution on the order
of a few micro-Gs, it is designed with an extremely compliant
suspension (a frictionless hinge will be ideal). The micro-G level
change
in acceleration tends to produce a measurable displacement in the proof
mass, which is detected by a pick-off, that in turn generates a
rebalance force to bring the proof mass back to its null (zero G)
position.
The higher input requires a higher rebalance force through a
controller. Thus, the signal that produces the rebalance force to
maintain the proof mass at its null position becomes the measure
of acceleration. Similar differential pick-off, forcing, torquing
or phase nulling approaches are employed in all closed loop sensors.
The closed loop sensor response does not depend upon the physical
change of the sensor directly, but upon an indirect measurement. As the
navigational grade accelerometer has to have resolution on the order
of a few micro-Gs, it is designed with an extremely compliant
suspension (a frictionless hinge will be ideal). The micro-G level
change
in acceleration tends to produce a measurable displacement in the proof
mass, which is detected by a pick-off, that in turn generates a
rebalance force to bring the proof mass back to its null (zero G)
position.
The higher input requires a higher rebalance force through a
controller. Thus, the signal that produces the rebalance force to
maintain the proof mass at its null position becomes the measure
of acceleration. Similar differential pick-off, forcing, torquing
or phase nulling approaches are employed in all closed loop sensors.
