










The function and dynamic behavior is analyzed using software tools and their modified extensions. For example, the proofmass of an accelerometer has to be practically rigid, so its structural modes are analyzed and lowest bending mode frequency is determined as it has to be significantly higher than the bandwidth of the servoloop. On the other hand, the hinge beams have to be weak enough to allow the proofmass displacement under lowest acceleration levels to be sensed This analysis is performed using finite element methods (FEM) like NASTRAN, ANSYS, COSMOS. Customized FEM and component mode reduction with lumped parameter synthesis (including simplified models of 'tested hardware') of multi-body structures for dynamic, thermal and radiation loads under various operational and storage environments. The FEM is also used to analyze the stresses in a diaphragm due to distortion caused by pressure.
Other examples of device function analysis include:
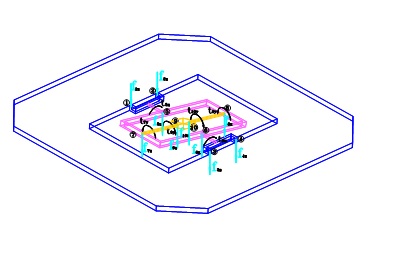
Functional Dynamics Analysis of Square Flutter
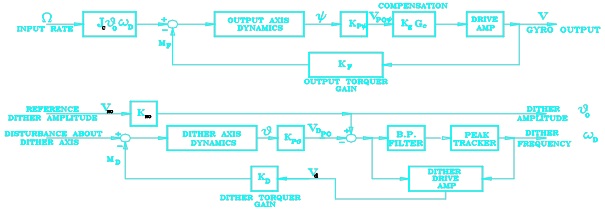
Servo Function Analysis of Square Flutter
Servo Function Analysis of Pendulous Accelerometer
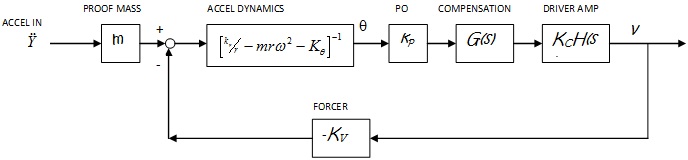
A switch capacitor is used with the pickoff impedance bridge to determine the displaced position of the proof mass. The forcing control is PID. A PWM forcer provides the forcing action.
Functional Mechanization of Precision Fiber Optic Gyro (PFOG)
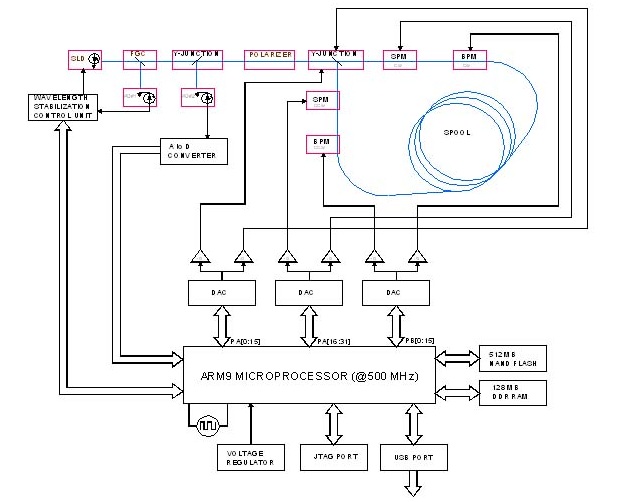
The PFOG drive and control functions are implemented with an ARM9 Microprocessor. The MIOC for this gyro has two differential modulators—one for bias phase shift to operate the gyro always at its peak sensitivity, and a second one to null the Sagnac phase shift developed under an applied angular rate. A couple of DACs are used to implement these servos. It also controls the LED current for wavelength stabilization. A third DAC is dedicated to the tuned Y-junction for 50/50 split of the light into two counter rotating parts. The PFOG function is simulated on a laptop.
