
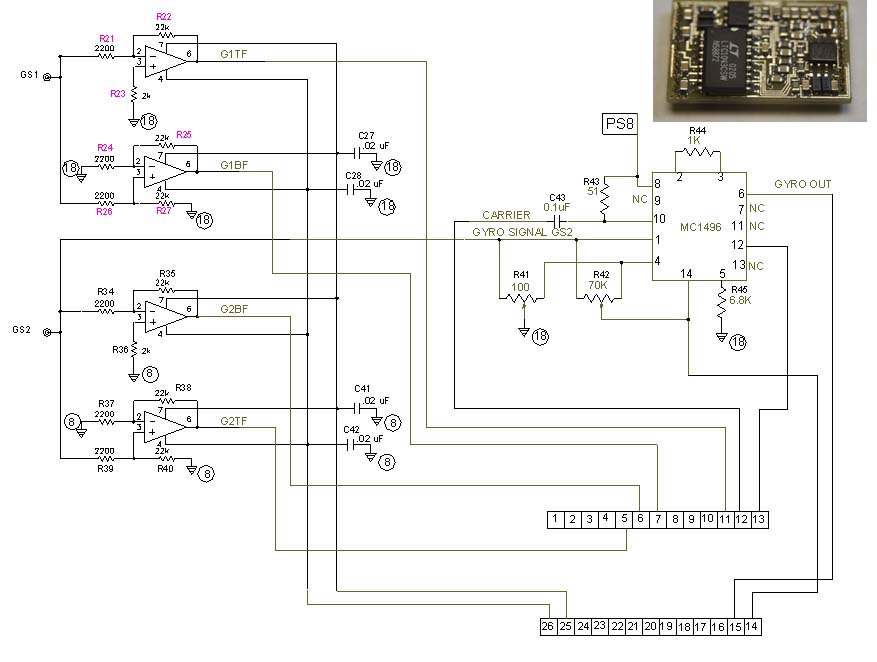
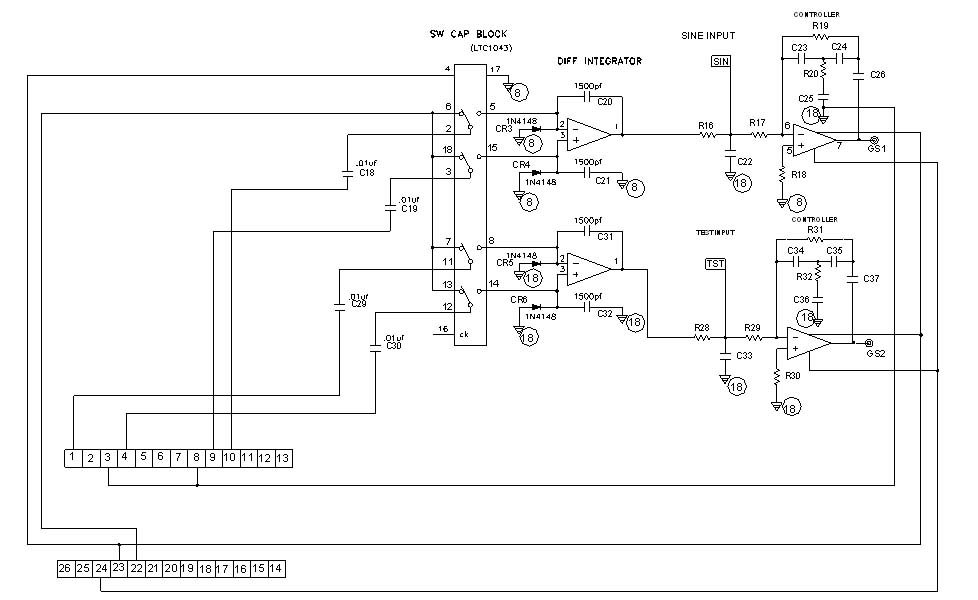
The Matchbox IMU incorporates 3 Axlgyro sensors. The accelerometer requires one analog servo loop, and the gyro requires two servo loops—one for keeping the amplitude of the flutter angular momentum constant, and the other for rebalancing the flutter. These three servo loops are packed in two small boards with surface mount components, and interconnected together via edge mounted 26 pins.
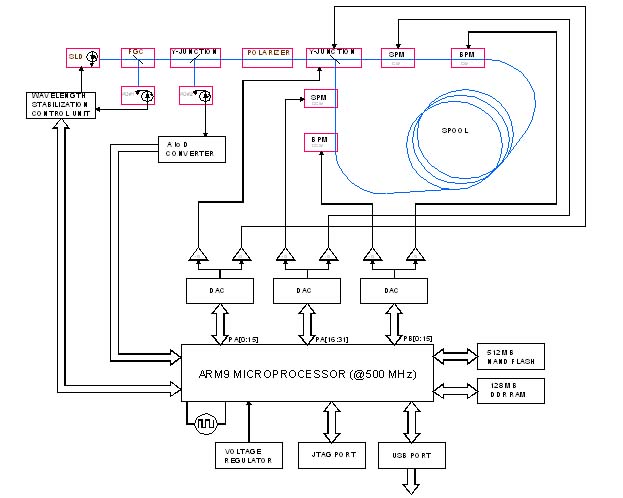
Waddan’s PFOG hybrid package electronics is implemented with an ARM9 Microprocessor. This MIOC for this gyro has two differential modulators—one for bias phase shift to operate the gyro always at its peak sensitivity, and a second one to null the Sagnac phase shift developed under an applied angular rate. A couple of DACs are used to implement these servos. It also controls the LED current for wavelength stabilization. A third DAC is dedicated to the tuned Y-junction for 50/50 split of the light into two counter rotating parts.
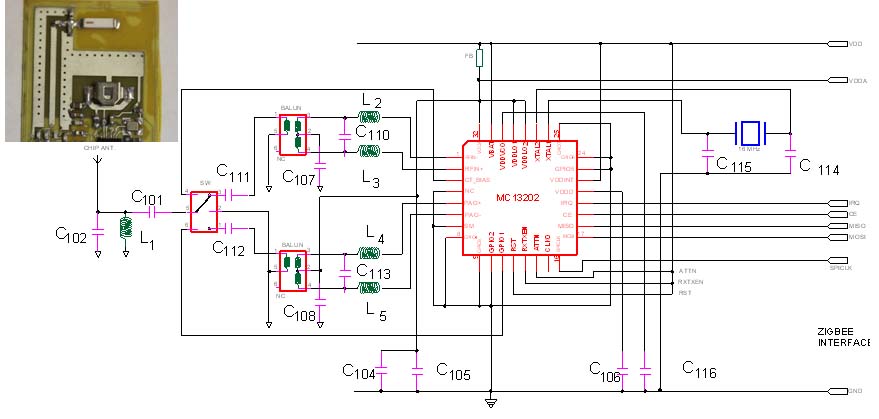
The chip used in this design integrates a microcontroller, a short haul transceiver, and also an AtoD converter. Only the sensors and their associated analog components need to be added. Since the application dictated that there should be no components on the cementing side of the board, only one antenna with a switch to Tx/Rx is used to save space.